|
|
|
|
|

- ابن دردش الآن
شهادة


ارتفاع محول عزم الدوران AC تردد ، العاكس تردد المحرك
تفاصيل المنتج:
شروط الدفع والشحن:
|



مفصلة وصف المنتج
| ابتداء من عزم الدوران: | عزم الدوران 0.5Hz / 150٪ ، نسبة السرعة 1: 100 ، استجابة ديناميكية <20ms ، دقة ثابتة في السرعة ± 0 | طريقة الكبح: | مع الكبح DC ، فرملة طاقة المقاومة |
|---|---|---|---|
| موثوقية عالية: | محرك الأقراص ناضجة وموثوق بها ، تصميم الدوائر الحماية ، تصميم مكافحة التدخل | pcb حماية: | رش ثلاثة المضادة للطلاء لحماية لوحة الدوائر بذكاء وكفاءة |
| بدء: | عزم دوران عالي بدء التشغيل ، يضمن بداية سلسة ، عزم دوران منخفض للتردد ، دون توقف للموقف | عزم الدوران: | عزم الدوران التلقائي تعزيز التعويض |
| تسليط الضوء: | vfd motor drive,ac frequency converter |
||
تحويل تردد محرك كندة في تطبيقات Paps
1 ، ميزات النظام traditonal
(1) يعمل النظام التقليدي عند التحميل الثقيل لفترة طويلة ، إلى الأمام وعكس التشغيل بشكل متكرر ، مدى عمر الجهاز
النظام قصير
(2) نسبة عالية الفشل.
(3) كفاءة منخفضة ، عامل الطاقة أقل من 0.8.
(4) أداء السلامة سيئة.
2 ، طلبات المحولات الترددية (VFD)
(1) عزم الدوران الناتج الكبير في التردد المنخفض ، ينبغي أن تعمل بسلاسة أثناء العمل.
(2) قدرة كبيرة الزائد.
(3) أقل نسبة الفشل ، تشغيل ثابت.
(4) يجب إضافة وحدة الكبح ومقاومة الكبح.
3 ، تطبيق حقيقي (رافعة برجية)
3. 1 مقدمة النظام
محرك الرفع في النظام هو 55kW / 380V ، ونوع الحمل هو عزم ثابت ، للنظر في خصائصه الثقيلة ،
يجب اختيار العاكس تردد اثنين من أحجام أعلى على النحو التالي:

3.2 مخطط النظام
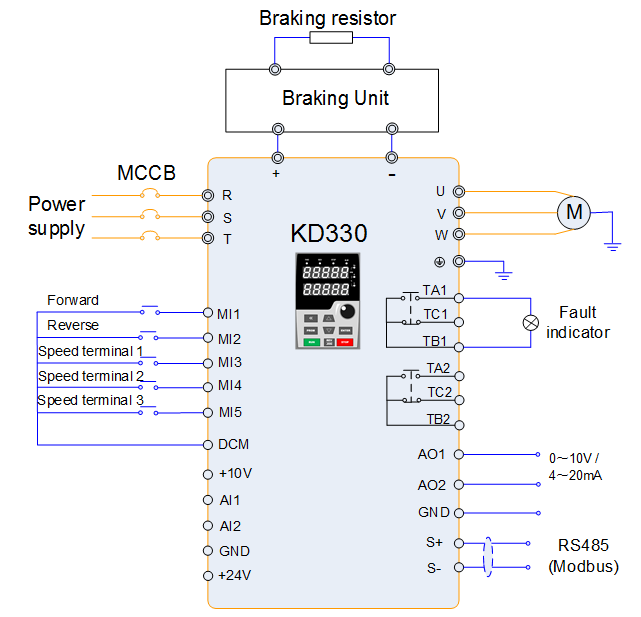
3.3 منطق التحكم
(1) يوفر نظام التحكم في الرافعة البرجية الإشارات الأمامية والعكسية ، في حين أغلق جهاز MI1 و DCM ، البرج
يتم تشغيل الرافعة إلى الأمام ، وبينما يتم إغلاق MI2 و DCM ، يتم تشغيل الرافعة البرجية بشكل عكسي:
(2) يتم التحكم في سرعة تشغيل الرافعة عن طريق تشغيل / إيقاف شروط MI3 و MI4 و MI5 ، على النحو التالي:
| MI5 | MI4 | MI3 | سرعة |
| إيقاف | إيقاف | إيقاف | السرعة 0 (FD-00) |
| إيقاف | إيقاف | على | السرعة 1 (FD-01) |
| إيقاف | على | إيقاف | السرعة 2 (FD-02) |
| إيقاف | على | على | السرعة 3 (FD-03) |
| على | إيقاف | إيقاف | السرعة 4 (FD-04) |
| على | إيقاف | على | السرعة 5 (FD-05) |
(3) الناتج العاكس إشارة خطأ لنظام التحكم في الرافعة ، في حين يحدث الخطأ ، فإن النظام سوف يكبح ويوقف فورا.
(4) هناك خرج FDT1 (التي تسيطر عليها F8-19 و F8-20) إشارة ON / OFF ، في حين أن العاكس يعمل على الإعداد
تردد ، هذه الإشارة سوف تتحكم في الفرامل لفتح ، لتجنب حدوث عكس المسار.
3.4 autotuning
لهذا النوع من نظام الخدمة الشاقة ، من الأفضل استخدام وضع Sensorless Vector Control (SVC) ، سيحصل على أداء أفضل لعزم الدوران.
قبل استخدام وضع SVC ، يرجى إجراء autotunning المحرك ، والقيام بذلك على النحو التالي الخطوات:
1) تعيين F0-02 = 0 (لوحة المفاتيح) ، تعيين القيمة الصحيحة من F2-01 ~ F2-05 (على أساس اللوحة الآلية) ؛
2) إذا كان يمكن إزالة الحمل من المحرك ، يرجى ضبط F2-11 = 2 (التناوب التلقائي ، الحصول على أداء أفضل) ، إذا كان
لا يمكن إزالة الحمل من المحرك ، يرجى ضبط F2-11 = 1 (autotuning ثابت). ستعرض لوحة المفاتيح "TUNE".
3) اضغط على زر تشغيل ، وانتظر حتى الانتهاء التلقائي autotuning تلقائيا.
4) تغيير قيمة F0-01 = 0 (التحكم في ناقلات بدون مستشعر)
3.5 معلمات الإعداد
| لا. | رموز وظيفية | افتراضي | قيمة الضبط | تفسير |
| 1 | F0-01 | 2 | 0 | تحكم Vector sensorless |
| 2 | F0-02 | 0 | 1 | بداية / توقف فردية خارجية |
| 3 | F0-03 | 1 | 6 | سرعة متعددة الخطوات |
| 4 | F0-17 | النموذج يعتمد | 5S | وقت تسريع (قابل للتعديل) |
| 5 | F0-18 | النموذج يعتمد | 0.5S | وقت التباطؤ (قابل للتعديل) |
| 6 | F3-10 | 150٪ | 200٪ | الحد الأقصى لعزم uppee |
| 7 | F5-00 | 1 | 1 | إلى الأمام |
| 8 | F5-01 | 2 | 2 | عكس |
| 9 | F5-02 | 0 | 12 | متعدد الخطوة السرعة termnial 1 |
| 10 | F5-03 | 0 | 13 | متعدد الخطوة السرعة termnial 2 |
| 11 | F5-04 | 0 | 14 | متعدد الخطوة السرعة termnial 3 |
| 12 | F6-02 | 2 | 2 | الإخراج خطأ |
| 13 | F6-05 | 0 | 3 | خرج FDT1 |
| 14 | F8-19 | 50.00Hz | 3.00Hz | ضبط تردد الإخراج FDT1 |
| 15 | FD-00 | 0.00٪ | 16٪ | سرعة متعددة الخطوات 0 (قابل للتعديل) |
| 16 | FD-01 | 0.00٪ | 16٪ | سرعة متعددة الخطوات 1 (قابلة للتعديل) |
| 17 | FD-02 | 0.00٪ | 30٪ | سرعة متعددة الخطوات 2 (قابلة للتعديل) |
| 18 | FD-03 | 0.00٪ | 50٪ | سرعة متعددة الخطوات 3 (قابلة للتعديل) |
| 19 | FD-04 | 0.00٪ | 70٪ | سرعة متعددة الخطوات 4 (قابلة للتعديل) |
| 20 | FD-05 | 0.00٪ | 82٪ | سرعة متعددة الخطوات 5 (قابلة للتعديل) |
3. 6 مشاكل واجهت أثناء التكليف
(1) بالنسبة إلى KD330-09000T4 ، فإنها تحتاج إلى توصيل وحدة فرملة إضافية ومقاومة للفرم لاستهلاك إعادة توليد
الطاقة. معلمة FA-04 هي عتبة الكبح ، القيمة الافتراضية هي 135٪. موقف الحافلة DC الجهد هو
540V ، 540 * 135٪ = 729V ، وهذا يعني أن فولطية DC تصل إلى 729V ، فإن وحدة الكبح ستبدأ العمل.
في بعض الأحيان ، يحدث خطأ في الجهد الكهربائي ، يرجى تقليل قيمة FA-04 لتجنب ذلك.
(2) نظرًا لأن مسافة عمل البرج طويلة جدًا ، وأثناء التشغيل ، يعمل العاكس في حالة التجدد لمدة طويلة ، لذلك يجب اختيار مقاوم الكبح أكبر ، للحصول على أداء أفضل. في هذا النظام ، هو كذلك
حدد 4ohm ، 10kW.
تفاصيل الاتصال
Shenzhen Kinda Technology Co., Ltd
اتصل شخص: Tim
الهاتف :: +8618665335699
إرسال استفسارك مباشرة لنا
أكثر محول تردد المحرك
-
كينو 150 حصان محول سرعة 110KW المحرك ثلاث مراحل 380V - 460V
-
عالية التردد موتور تردد محول 0.5 HP 0.4KW ناقلات التحكم
-
3 المرحلة محول التردد المحرك 110KW عالية الأداء لآلة النسيج
-
37KW محرك Vfd ، محول بلاستيك الطارد التردد للتحكم في المحركات
-
آلة التغليف محرك التردد المحول 3 المرحلة 380V - 460V تصميم وحدات
-
Vector ثلاثة Phase تردد محول 4KW 5.5KW 7.5KW اعتمادية عال